.png)
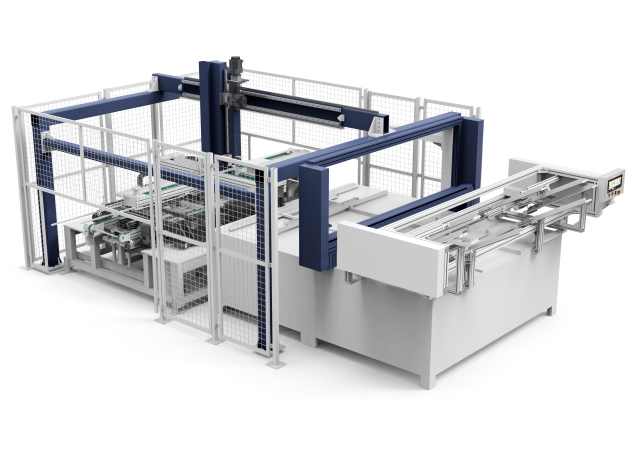








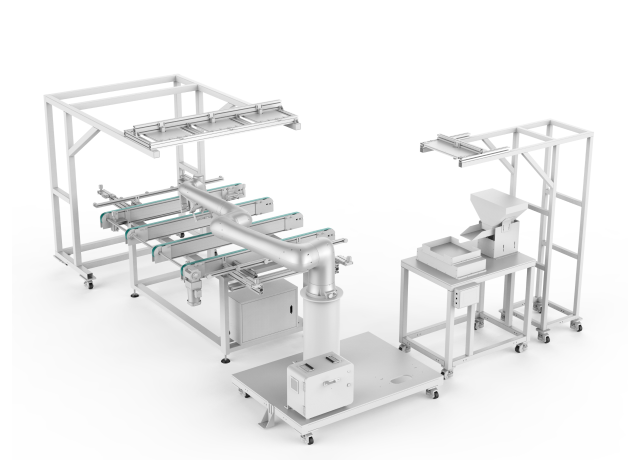


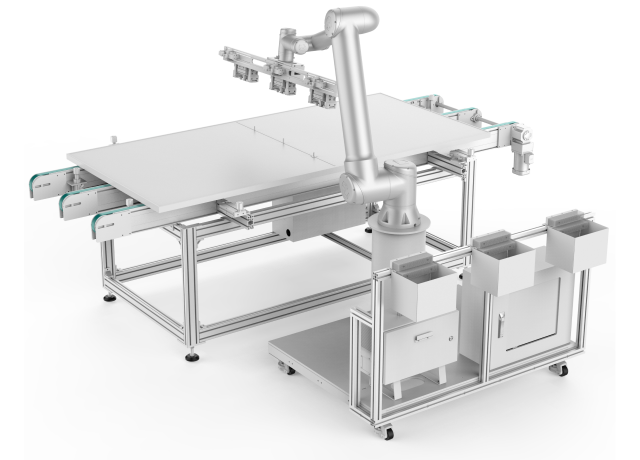
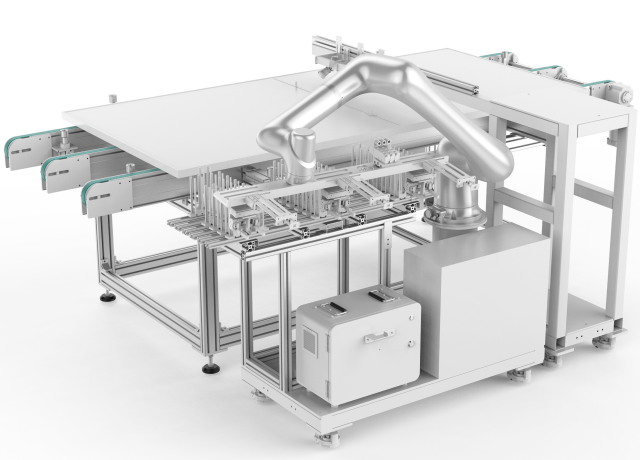
Structural Features
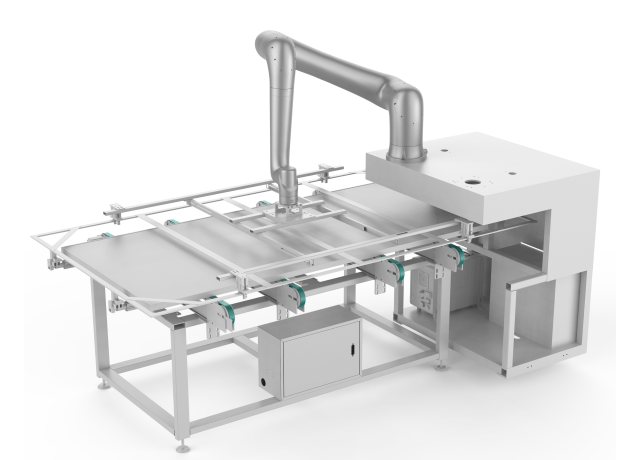
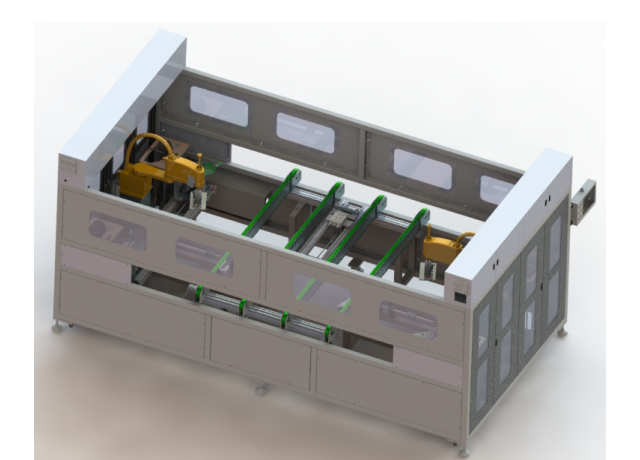
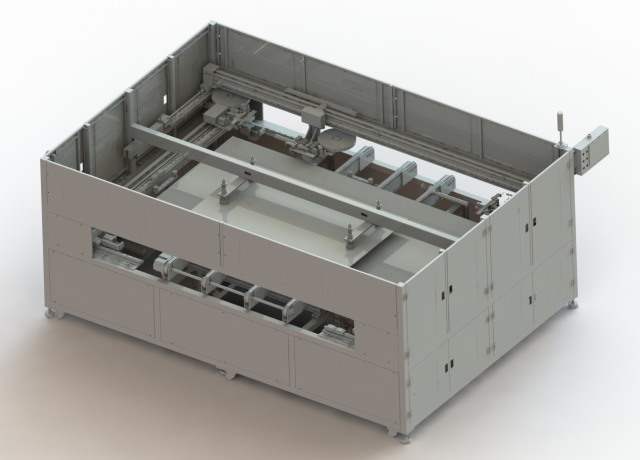
Place the input item at the specified position, and the robot operates to pick up the frame and place it at the designated location.
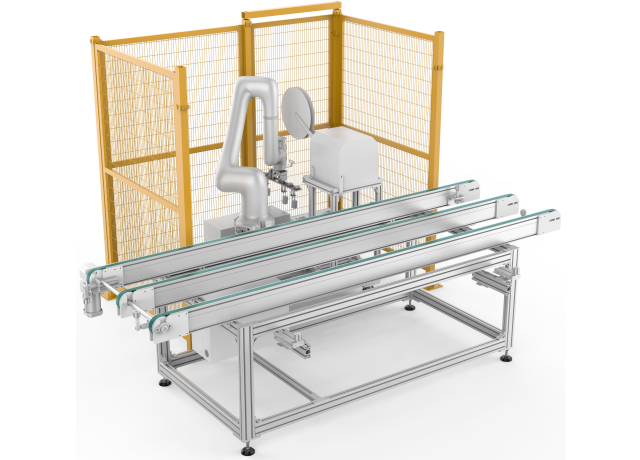
The robot's gripper starts to pick up the frame from the lifter. When the robot reaches a certain depth, the lifter begins to rise so that the robot can successfully pick up the frame.
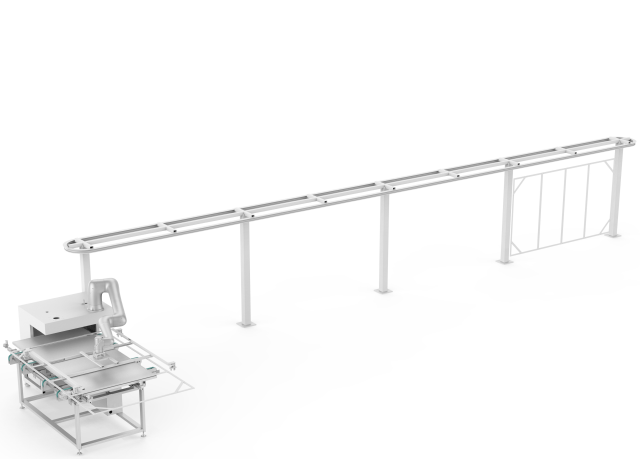
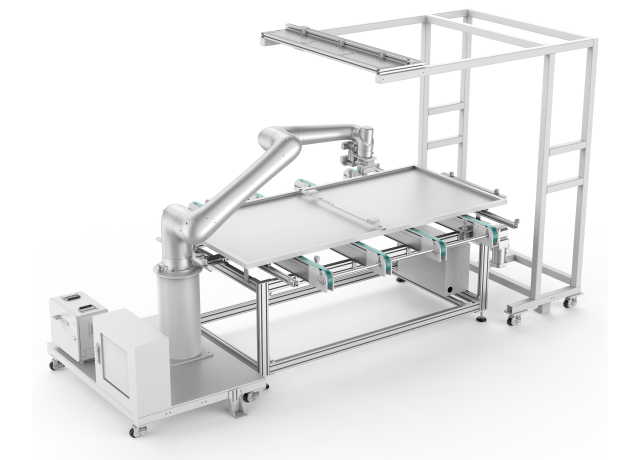
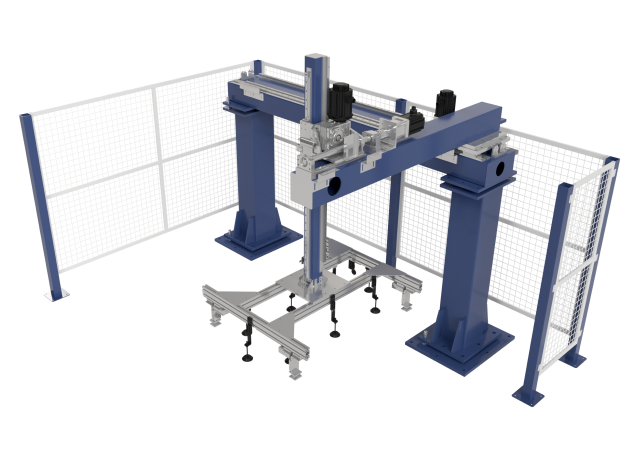
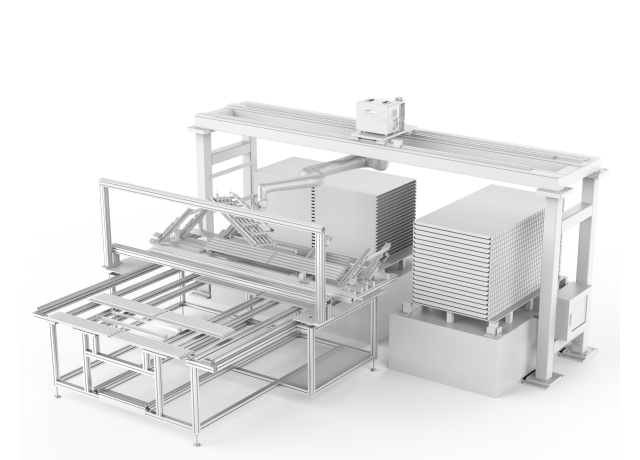
To better utilize the frame loading space, a seven-axis aerial robot has been added; this not only extends the robot's working range but also reduces the area required for frame loading materials.
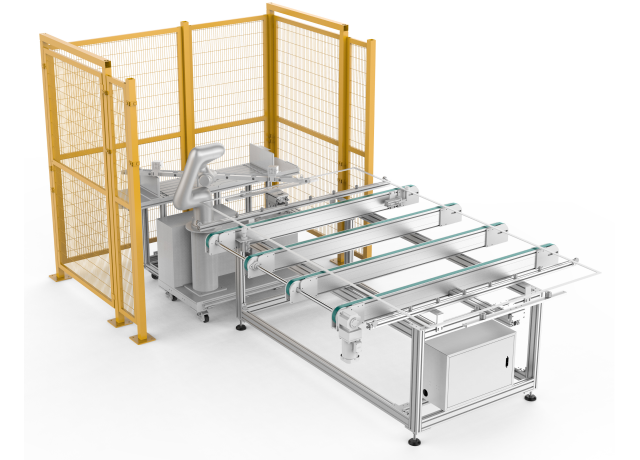
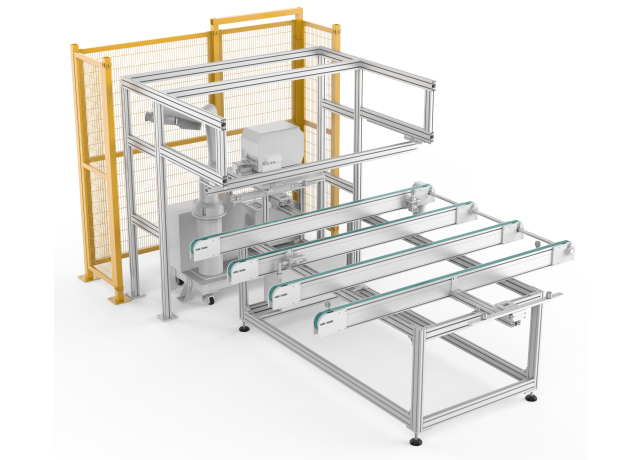
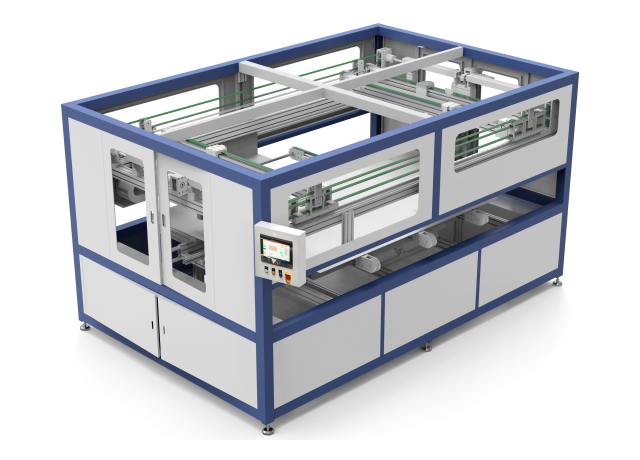
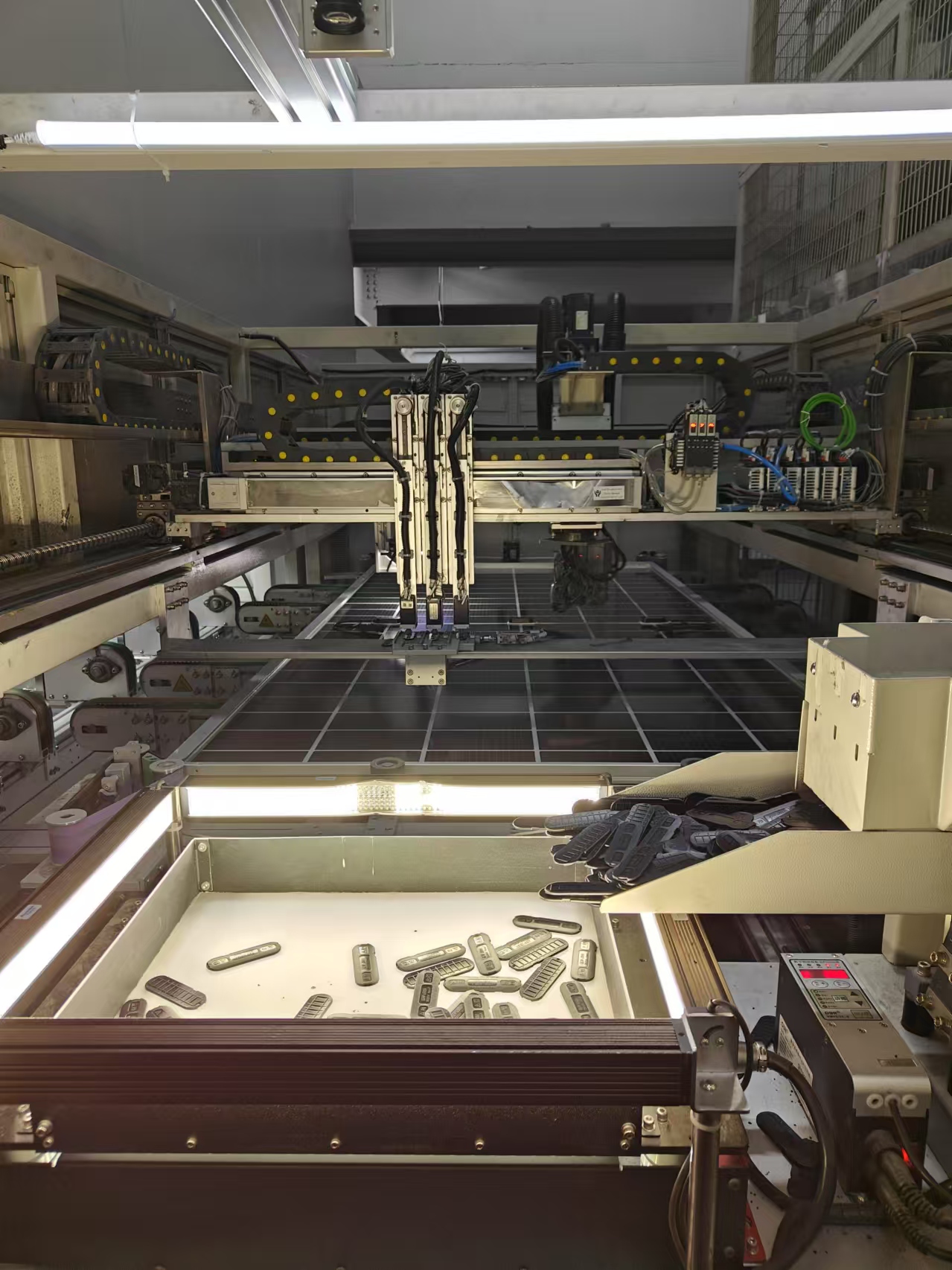
Structural Features
Operating Voltage
220V
Air Pressure
0.5-0.8MPa ≥ 200L/min
Air Supply Connection Size
ф16x2
Loading Frame Success Rate
>99%
Robot Arm Load
≤20kg
Unloading Frame Success Rate
>99%
Rated Power
5.5kW
Applicable Module Size
L(1630-2650mm) x W(950-1450mm)