.png)
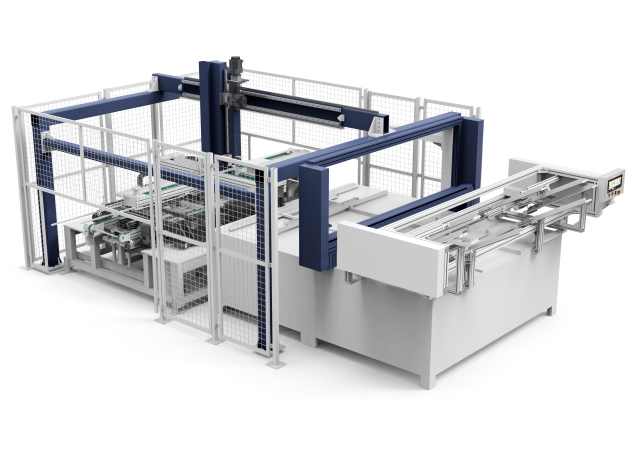
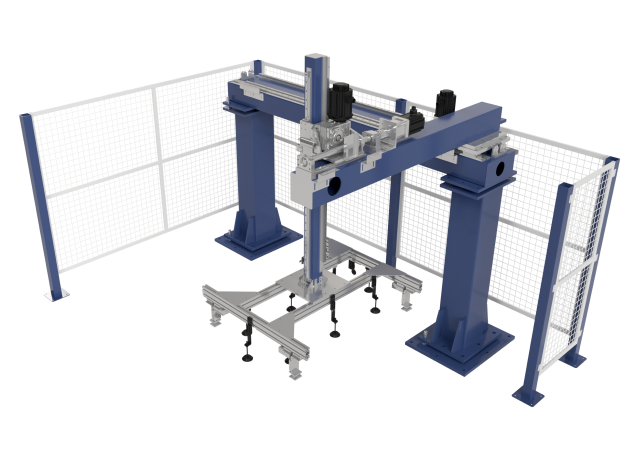

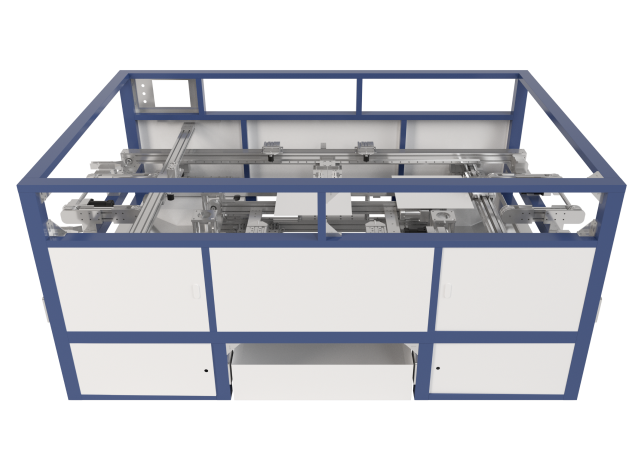
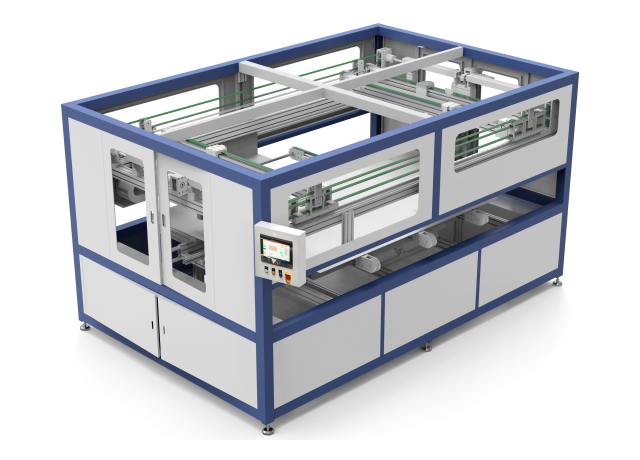
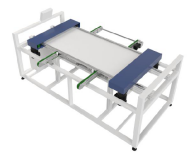







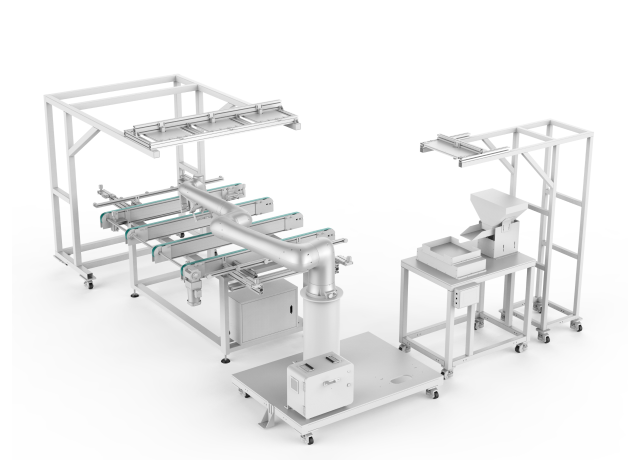


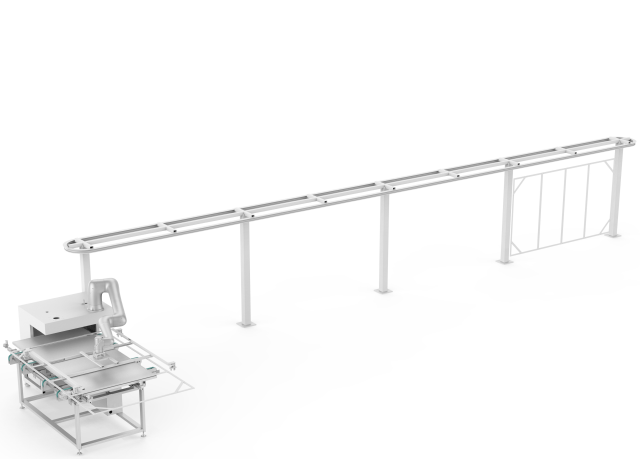
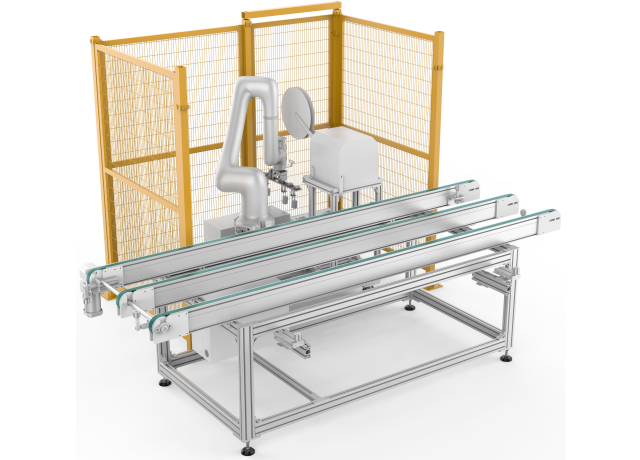
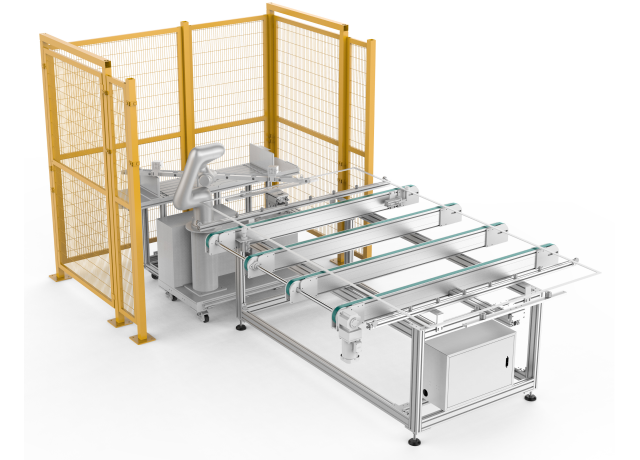
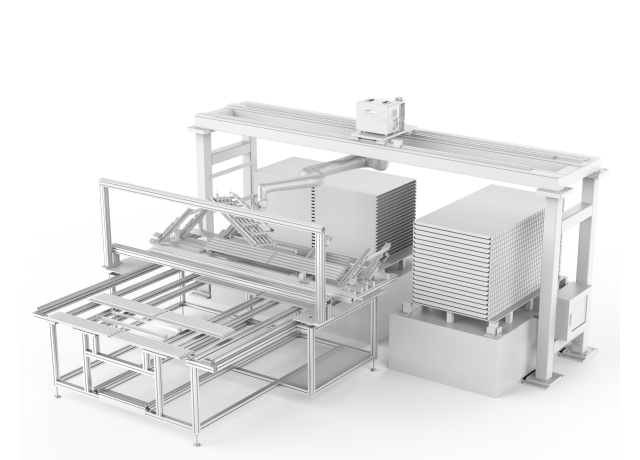
Structural Features
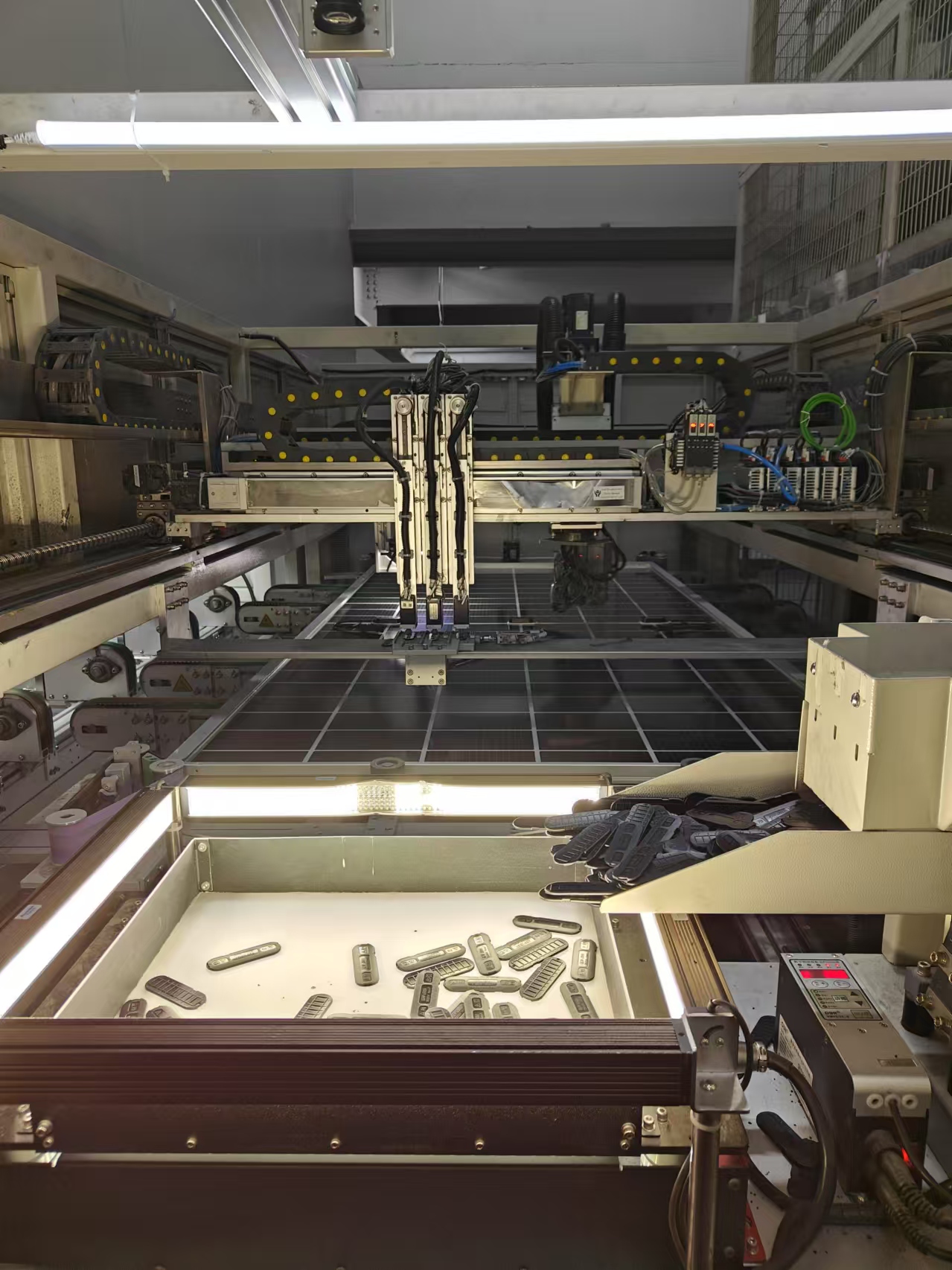
The high-definition camera is used to capture images of the target area. The images are analyzed and calculated by the vision positioning system, and the calculation results are sent to the PLC to guide the robot in accurately picking and removing the target.
The high-definition camera performs image capture, the vision positioning system conducts image analysis, calculates target coordinates and angle information, and sends the results to the PLC.
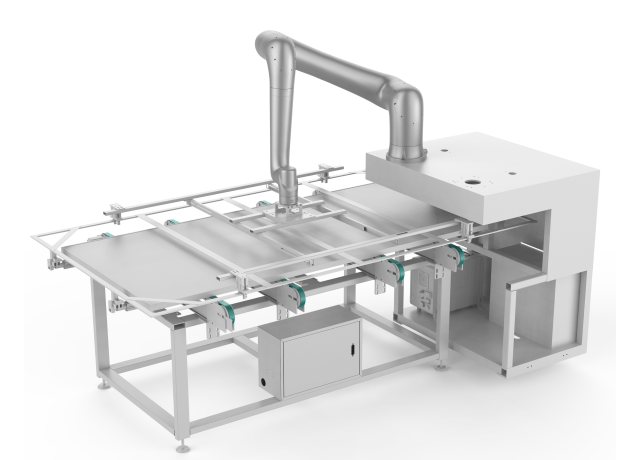
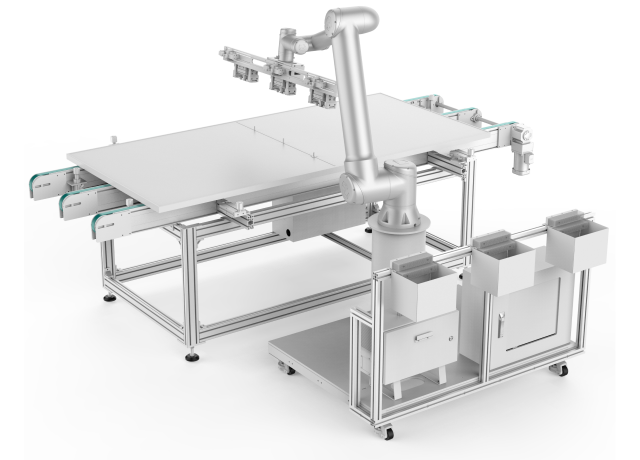
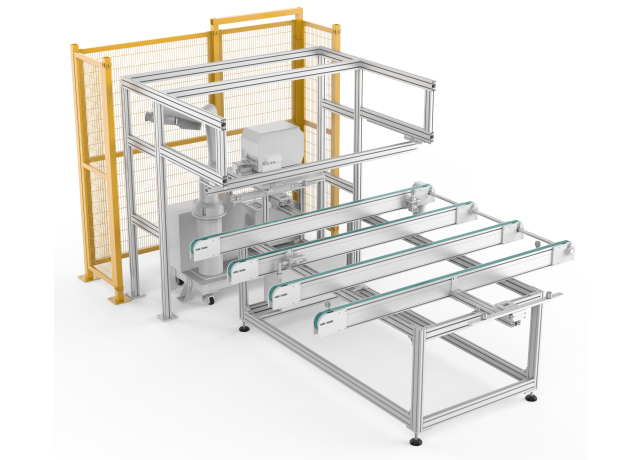
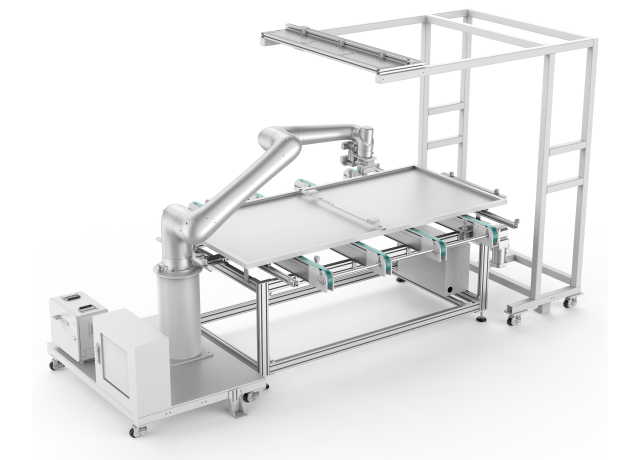
When the incoming module is in position, the camera takes a picture for positioning. The positive and negative lead wires are removed, and the powered tool will be detached from the frame.
The robot flexibly unloads the test fixtures.
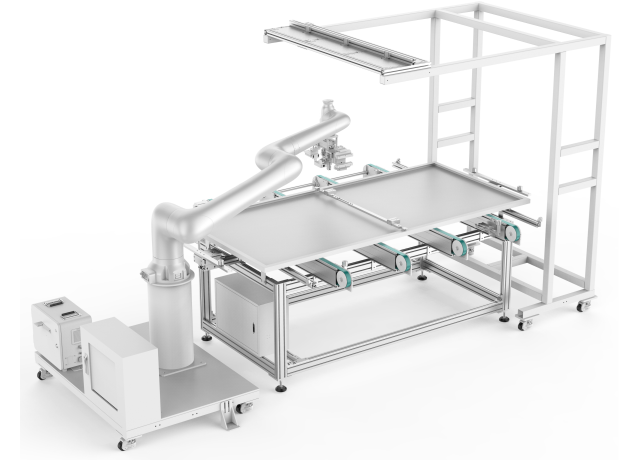
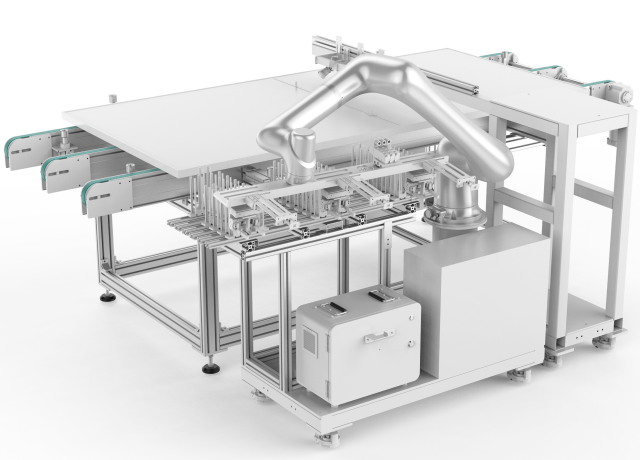
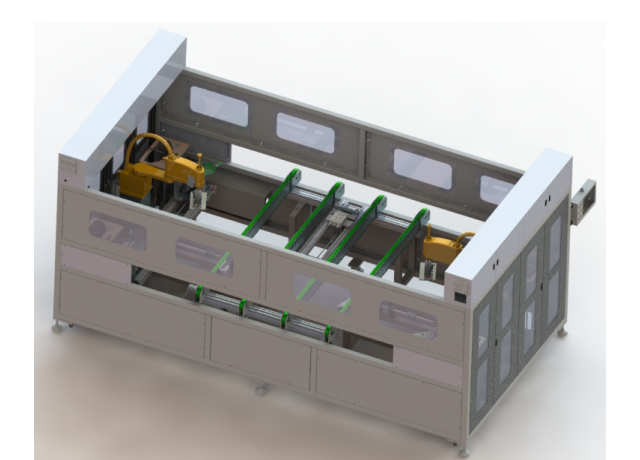
Structural Features
Working Voltage
220V
Air Pressure
0.5-0.8MPa, ≥200L/min
Air Source Connection Size
ф10mm
Rated Power
3.5kW
Operating Rate
99.5%
Robot Load
≤20kg
Disassembly Success Rate
>99%
Module Positioning Method
Camera
Test Fixture Pick-and-Place Success Rate
>99%
Integrated Cycle Time
14 seconds
Applicable Module Size
L(1630-2650mm) × W(950-1450mm)