.png)
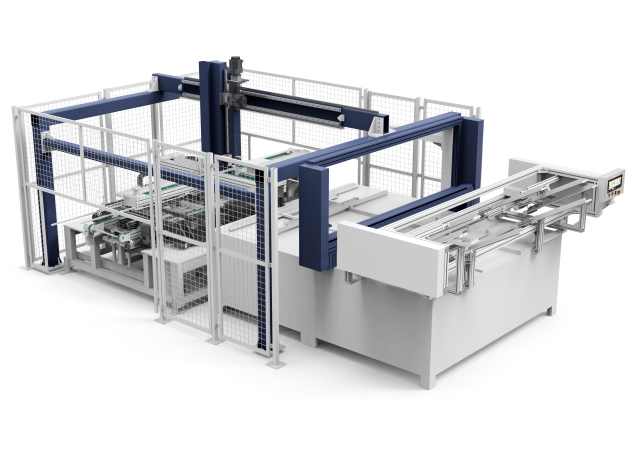

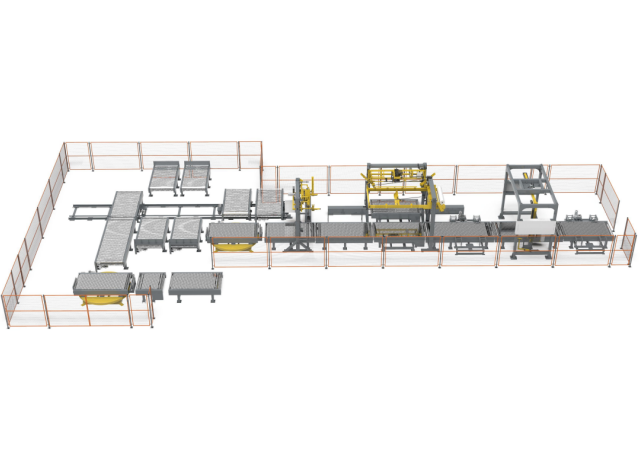







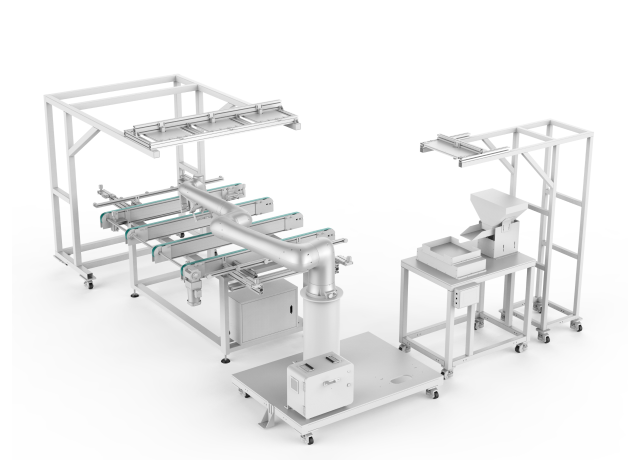


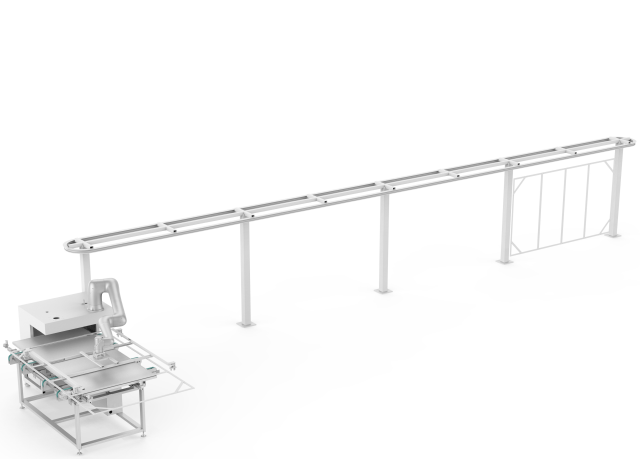
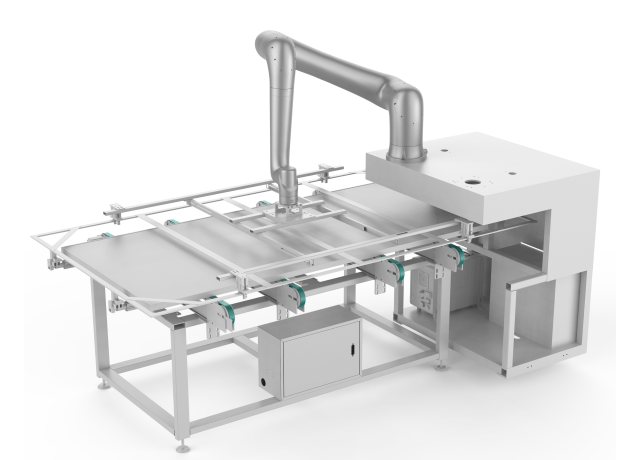
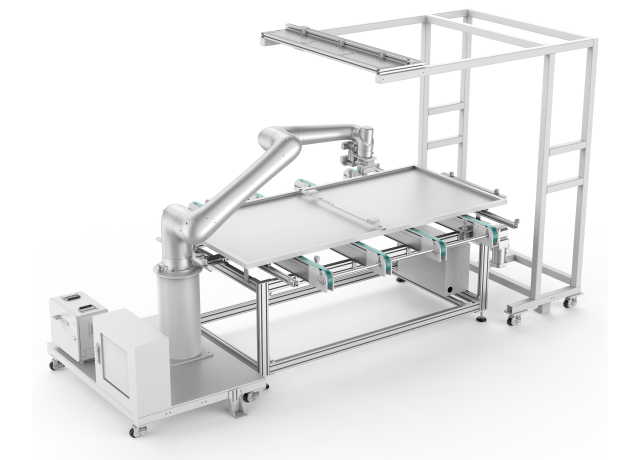
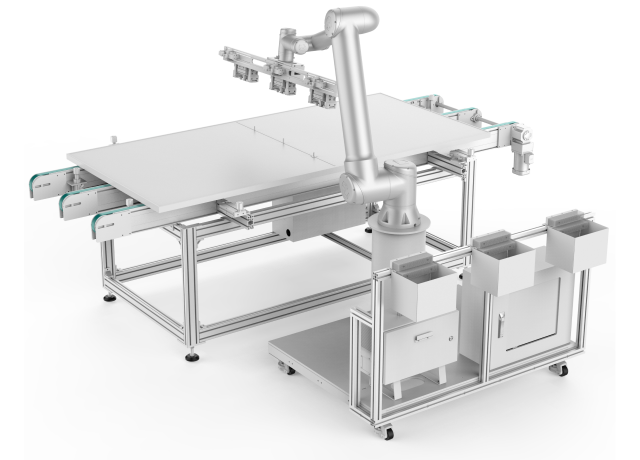
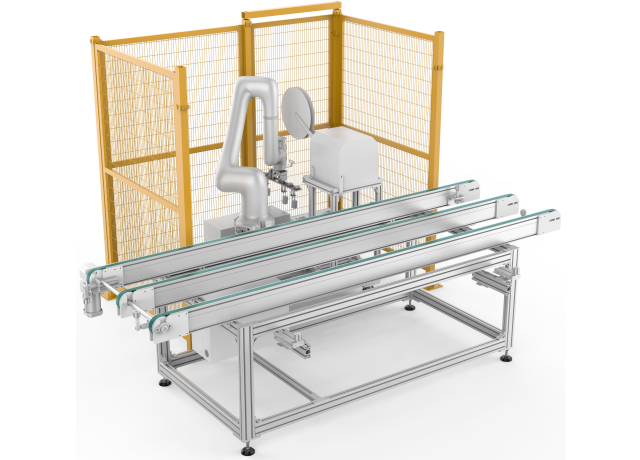
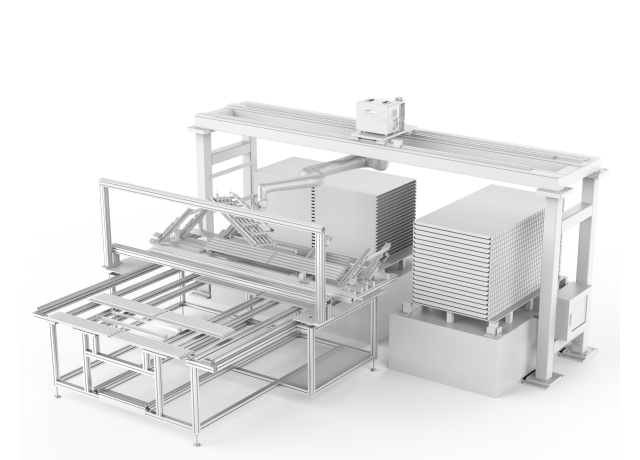
ROBOT LOADING TESTING JIG
This equipment can realize the robot automatic installation tools,guide the accurateinstallation of the manipulator by the visual positioning system.
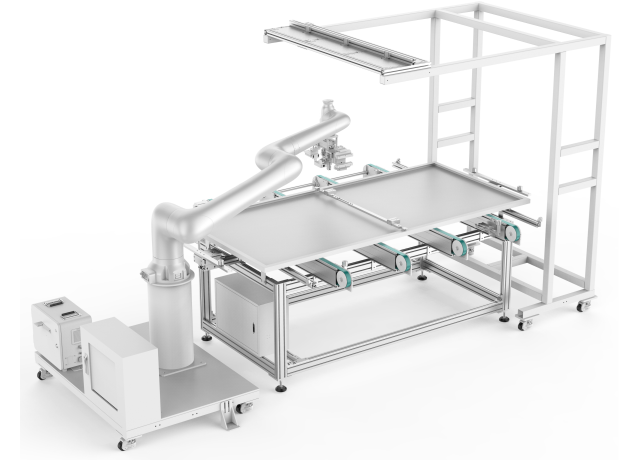
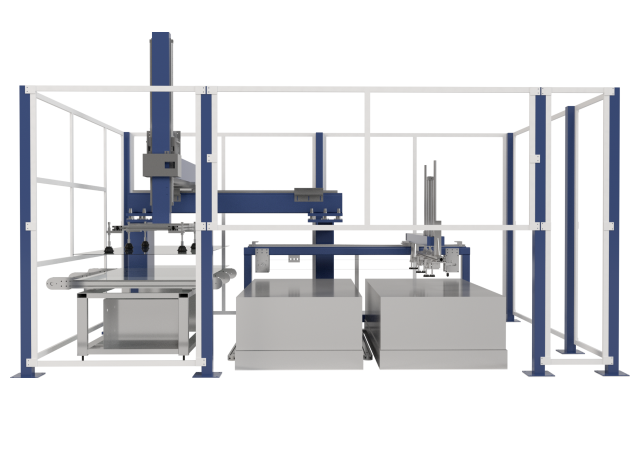
Structural Features
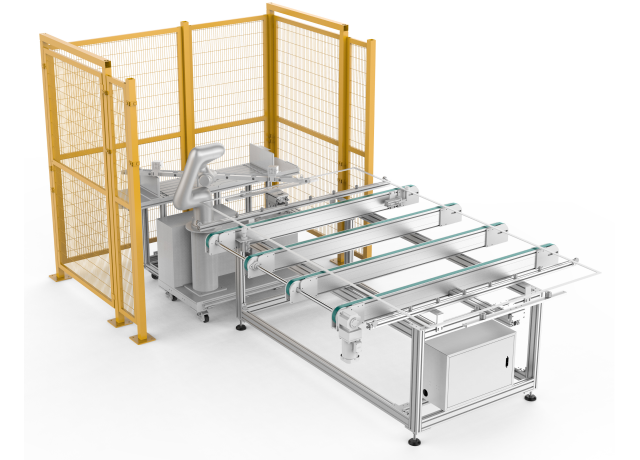
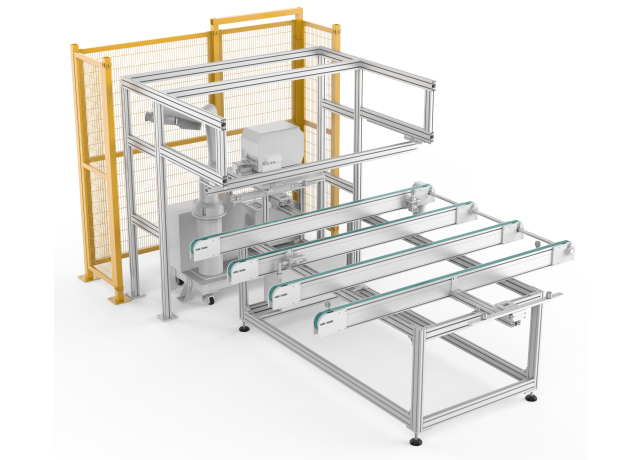
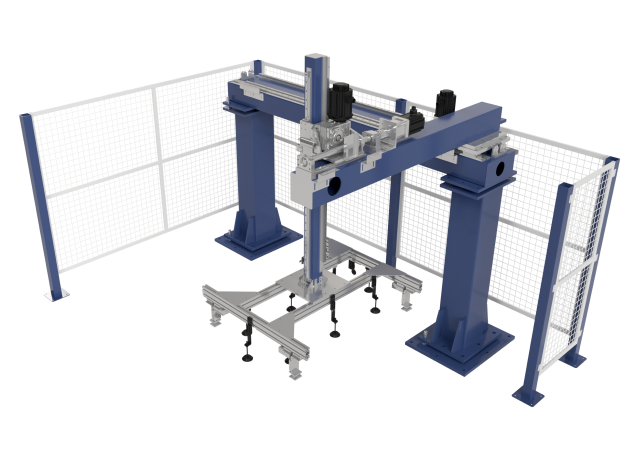
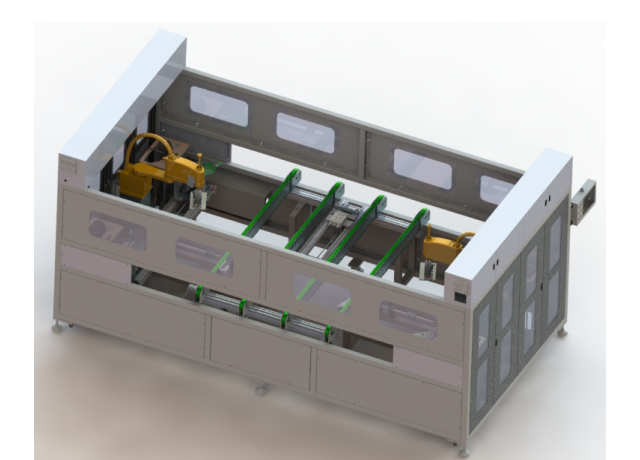
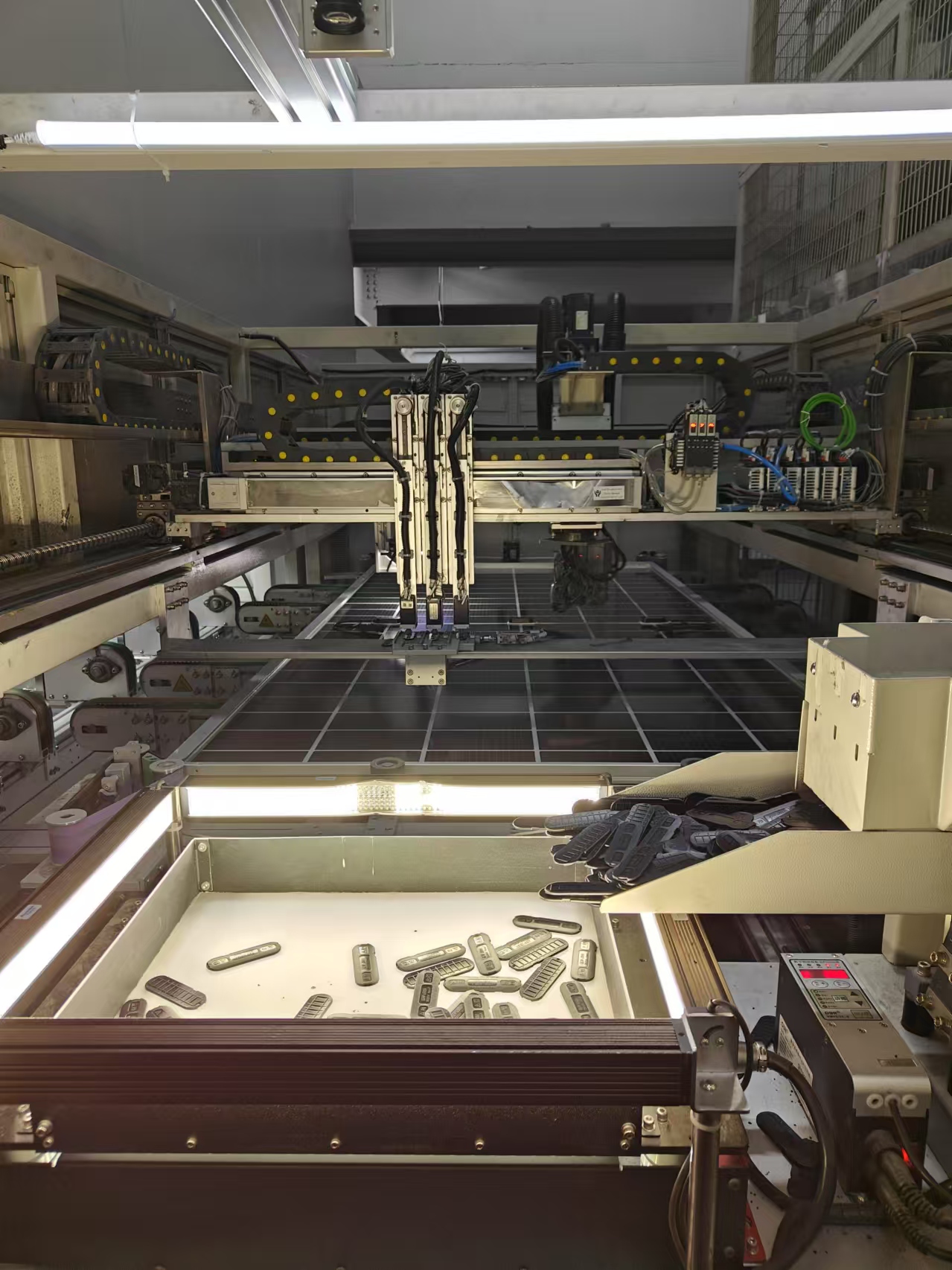
High-definition cameras are used to capture images of the target area. The images are analyzed and processed by the visual positioning system, and the computed results are then sent to the PLC to guide the robotic arm in accurately installing the target.
The high-definition camera performs the image capture function, while the visual positioning system handles image analysis, computes the target coordinates and angle information, and sends the results to the PLC.
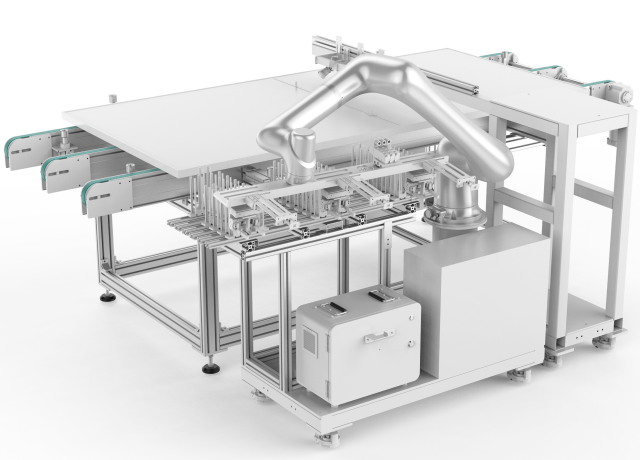
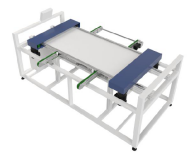
Robots are used flexibly to handle the testing fixtures.
Structural Features
Working Voltage
220V
Air Pressure
0.5-0.8MPa, ≥200L/min
Air Supply Connection Size
ф10mm
Rated Power
3.5kW
Yield
>99%
Robot Load
≤20kg
Module Positioning Method
Camera
Operational Rate
99.5%
Integrated Cycle Time
14 seconds
Applicable Module Size
L(1630-2650mm) x W(950-1450mm)